-
Notifications
You must be signed in to change notification settings - Fork 107
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Merge pull request #557 from roboflow/sam2
SAM2
- Loading branch information
Showing
26 changed files
with
1,192 additions
and
2 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,56 @@ | ||
| FROM nvcr.io/nvidia/cuda:12.4.1-cudnn-devel-ubuntu22.04 | ||
|
|
||
| WORKDIR /app | ||
|
|
||
| RUN rm -rf /var/lib/apt/lists/* && apt-get clean && apt-get update -y && DEBIAN_FRONTEND=noninteractive apt-get install -y \ | ||
| ffmpeg \ | ||
| libxext6 \ | ||
| libopencv-dev \ | ||
| uvicorn \ | ||
| python3-pip \ | ||
| git \ | ||
| libgdal-dev \ | ||
| wget \ | ||
| gcc \ | ||
| && rm -rf /var/lib/apt/lists/* | ||
|
|
||
| COPY requirements/requirements.sam2.txt \ | ||
| requirements/requirements.http.txt \ | ||
| requirements/_requirements.txt \ | ||
| requirements/requirements.gpu.txt \ | ||
| requirements/requirements.sdk.http.txt \ | ||
| ./ | ||
|
|
||
| RUN python3 -m pip install --upgrade pip | ||
| RUN python3 -m pip install --extra-index-url https://download.pytorch.org/whl/cu141 \ | ||
| -r _requirements.txt \ | ||
| -r requirements.sam2.txt \ | ||
| -r requirements.http.txt \ | ||
| -r requirements.gpu.txt \ | ||
| -r requirements.sdk.http.txt \ | ||
| --upgrade \ | ||
| && rm -rf ~/.cache/pip | ||
|
|
||
| WORKDIR /sam | ||
| RUN git clone https://github.com/facebookresearch/segment-anything-2 | ||
| COPY inference/models/sam2/sam.patch ./ | ||
| RUN cd segment-anything-2 && git checkout 0e78a118995e66bb27d78518c4bd9a3e95b4e266 && git apply ../sam.patch && TORCH_CUDA_ARCH_LIST="6.0 6.1 7.0 7.5 8.0 8.6" python3 -m pip install -e . && rm -rf ~/.cache/pip | ||
|
|
||
| WORKDIR /app/ | ||
| COPY inference inference | ||
| COPY inference_sdk inference_sdk | ||
| COPY docker/config/gpu_http.py gpu_http.py | ||
|
|
||
| ENV VERSION_CHECK_MODE=continuous | ||
| ENV PROJECT=roboflow-platform | ||
| ENV NUM_WORKERS=1 | ||
| ENV HOST=0.0.0.0 | ||
| ENV PORT=9001 | ||
| ENV WORKFLOWS_STEP_EXECUTION_MODE=local | ||
| ENV WORKFLOWS_MAX_CONCURRENT_STEPS=1 | ||
| ENV API_LOGGING_ENABLED=True | ||
| ENV LMM_ENABLED=True | ||
| ENV PYTHONPATH=/app/ | ||
| ENV CORE_MODEL_SAM2_ENABLED=True | ||
|
|
||
| ENTRYPOINT uvicorn gpu_http:app --workers $NUM_WORKERS --host $HOST --port $PORT |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,216 @@ | ||
| <a href="https://github.com/facebookresearch/segment-anything-2" target="_blank">Segment Anything 2</a> is an open source image segmentation model. | ||
|
|
||
| You can use Segment Anything 2 to identify the precise location of objects in an image. This process can generate masks for objects in an image iteratively, by specifying points to be included or discluded from the segmentation mask. | ||
|
|
||
| ## How to Use Segment Anything | ||
|
|
||
| To use Segment Anything 2 with Inference, you will need a Roboflow API key. If you don't already have a Roboflow account, <a href="https://app.roboflow.com" target="_blank">sign up for a free Roboflow account</a>. Then, retrieve your API key from the Roboflow dashboard. | ||
|
|
||
| ## How To Use SAM2 Locally With Inference | ||
|
|
||
| We will follow along with the example located at `examples/sam2/sam2.py`. | ||
|
|
||
| We start with the following image, | ||
|
|
||
|  | ||
|
|
||
| compute the most prominent mask, | ||
|
|
||
| 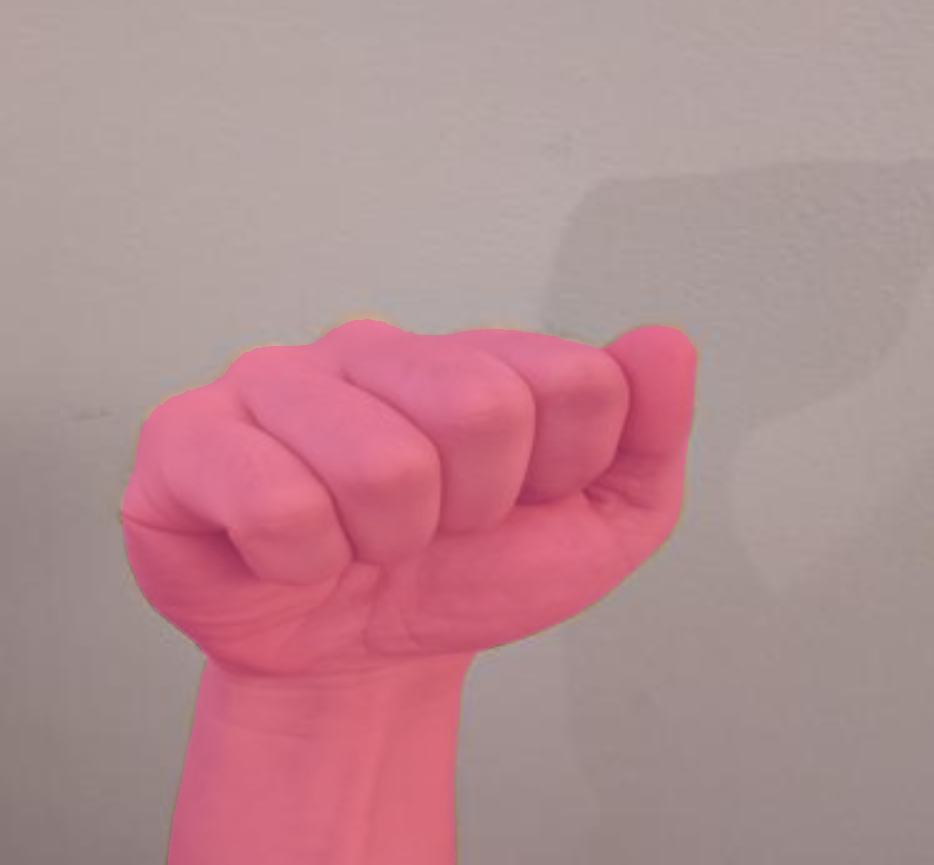 | ||
|
|
||
| and negative prompt the wrist to obtain only the fist. | ||
|
|
||
|  | ||
|
|
||
| ### Running within docker | ||
| Build the dockerfile (make sure your cwd is at the root of inference) with | ||
| ``` | ||
| docker build -f docker/dockerfiles/Dockerfile.sam2 -t sam2 . | ||
| ``` | ||
|
|
||
| Start up an interactive terminal with | ||
| ``` | ||
| docker run -it --rm --entrypoint bash -v $(pwd)/scratch/:/app/scratch/ -v /tmp/cache/:/tmp/cache/ -v $(pwd)/inference/:/app/inference/ --gpus=all --net=host sam2 | ||
| ``` | ||
| You can save files to `/app/scratch/` to use them on the host device. | ||
|
|
||
| Or, start a sam2 server with | ||
| ``` | ||
| docker run -it --rm -v /tmp/cache/:/tmp/cache/ -v $(pwd)/inference/:/app/inference/ --gpus=all --net=host sam2 | ||
| ``` | ||
|
|
||
| and interact over http. | ||
|
|
||
| ### Imports | ||
| Set up your api key, and install <a href="https://github.com/facebookresearch/segment-anything-2" target="_blank">Segment Anything 2</a> | ||
|
|
||
| !!! note | ||
|
|
||
| There's <a href="https://github.com/facebookresearch/segment-anything-2/issues/48" target="_blank">currently a problem</a> with sam2 + flash attention on certain gpus, like the L4 or A100. Use the fix in the posted thread, or use the docker image we provide for sam2. | ||
|
|
||
| ``` | ||
| import os | ||
| os.environ["API_KEY"] = "<YOUR-API-KEY>" | ||
| from inference.models.sam2 import SegmentAnything2 | ||
| from inference.core.utils.postprocess import masks2poly | ||
| import supervision as sv | ||
| from PIL import Image | ||
| import numpy as np | ||
| image_path = "./examples/sam2/hand.png" | ||
| ``` | ||
| ### Model Loading | ||
| Load the model with | ||
| ``` | ||
| m = SegmentAnything2(model_id="sam2/hiera_large") | ||
| ``` | ||
|
|
||
| Other values for `model_id` are `"hiera_small", "hiera_large", "hiera_tiny", "hiera_b_plus"`. | ||
|
|
||
| ### Compute the Most Prominent Mask | ||
|
|
||
| ``` | ||
| # call embed_image before segment_image to precompute embeddings | ||
| embedding, img_shape, id_ = m.embed_image(image_path) | ||
| # segments image using cached embedding if it exists, else computes it on the fly | ||
| raw_masks, raw_low_res_masks = m.segment_image(image_path) | ||
| # convert binary masks to polygons | ||
| raw_masks = raw_masks >= m.predictor.mask_threshold | ||
| poly_masks = masks2poly(raw_masks) | ||
| ``` | ||
| Note that you can embed the image as soon as you know you want to process it, and the embeddings are cached automatically for faster downstream processing. | ||
|
|
||
| The resulting mask will look like this: | ||
|
|
||
|  | ||
|
|
||
| ### Negative Prompt the Model | ||
| ``` | ||
| point = [250, 800] | ||
| # give a negative point (point_label 0) or a positive example (point_label 1) | ||
| # uses cached masks from prior call | ||
| raw_masks2, raw_low_res_masks2 = m.segment_image( | ||
| image_path, | ||
| point_coords=[point], | ||
| point_labels=[0], | ||
| ) | ||
| raw_masks2 = raw_masks2 >= m.predictor.mask_threshold | ||
| ``` | ||
| Here we tell the model that the cached mask should not include the wrist. | ||
|
|
||
| The resulting mask will look like this: | ||
|
|
||
|  | ||
|
|
||
| ### Annotate | ||
| Use <a href="https://github.com/roboflow/supervision" target="_blank">Supervision</a> to draw the results of the model. | ||
|
|
||
| ``` | ||
| image = np.array(Image.open(image_path).convert("RGB")) | ||
| mask_annotator = sv.MaskAnnotator() | ||
| dot_annotator = sv.DotAnnotator() | ||
| detections = sv.Detections( | ||
| xyxy=np.array([[0, 0, 100, 100]]), mask=np.array([raw_masks]) | ||
| ) | ||
| detections.class_id = [i for i in range(len(detections))] | ||
| annotated_image = mask_annotator.annotate(image.copy(), detections) | ||
| im = Image.fromarray(annotated_image) | ||
| im.save("sam.png") | ||
| detections = sv.Detections( | ||
| xyxy=np.array([[0, 0, 100, 100]]), mask=np.array([raw_masks2]) | ||
| ) | ||
| detections.class_id = [i for i in range(len(detections))] | ||
| annotated_image = mask_annotator.annotate(image.copy(), detections) | ||
| dot_detections = sv.Detections( | ||
| xyxy=np.array([[point[0] - 1, point[1] - 1, point[0] + 1, point[1] + 1]]), | ||
| class_id=np.array([1]), | ||
| ) | ||
| annotated_image = dot_annotator.annotate(annotated_image, dot_detections) | ||
| im = Image.fromarray(annotated_image) | ||
| im.save("sam_negative_prompted.png") | ||
| ``` | ||
| ## How To Use SAM2 With a Local Docker Container HTTP Server | ||
|
|
||
| ### Build and Start The Server | ||
|
|
||
| Build the dockerfile (make sure your cwd is at the root of inference) with | ||
| ``` | ||
| docker build -f docker/dockerfiles/Dockerfile.sam2 -t sam2 . | ||
| ``` | ||
| and start a sam2 server with | ||
| ``` | ||
| docker run -it --rm -v /tmp/cache/:/tmp/cache/ -v $(pwd)/inference/:/app/inference/ --gpus=all --net=host sam2 | ||
| ``` | ||
|
|
||
| ### Embed an Image | ||
|
|
||
| An embedding is a numeric representation of an image. SAM uses embeddings as input to calcualte the location of objects in an image. | ||
|
|
||
| Create a new Python file and add the following code: | ||
|
|
||
| ```python | ||
| import requests | ||
|
|
||
| infer_payload = { | ||
| "image": { | ||
| "type": "base64", | ||
| "value": "https://i.imgur.com/Q6lDy8B.jpg", | ||
| }, | ||
| "image_id": "example_image_id", | ||
| } | ||
|
|
||
| base_url = "http://localhost:9001" | ||
|
|
||
| # Define your Roboflow API Key | ||
| api_key = "YOUR ROBOFLOW API KEY" | ||
|
|
||
| res = requests.post( | ||
| f"{base_url}/sam2/embed_image?api_key={api_key}", | ||
| json=infer_payload, | ||
| ) | ||
|
|
||
| ``` | ||
|
|
||
| This code makes a request to Inference to embed an image using SAM. | ||
|
|
||
| The `example_image_id` is used to cache the embeddings for later use so you don't have to send them back in future segmentation requests. | ||
|
|
||
| ### Segment an Object | ||
|
|
||
| To segment an object, you need to know at least one point in the image that represents the object that you want to use. | ||
|
|
||
| !!! tip "For testing with a single image, you can upload an image to the <a href="https://roboflow.github.io/polygonzone/" target="_blank">Polygon Zone web interface</a> and hover over a point in the image to see the coordinates of that point." | ||
|
|
||
| You may also opt to use an object detection model to identify an object, then use the center point of the bounding box as a prompt for segmentation. | ||
|
|
||
| Create a new Python file and add the following code: | ||
|
|
||
| ```python | ||
| #Define request payload | ||
| infer_payload = { | ||
| "image": { | ||
| "type": "base64", | ||
| "value": "https://i.imgur.com/Q6lDy8B.jpg", | ||
| }, | ||
| "point_coords": [[380, 350]], | ||
| "point_labels": [1], | ||
| "image_id": "example_image_id", | ||
| } | ||
|
|
||
| res = requests.post( | ||
| f"{base_url}/sam2/embed_image?api_key={api_key}", | ||
| json=infer_payload, | ||
| ) | ||
|
|
||
| masks = request.json()['masks'] | ||
| ``` | ||
|
|
||
| This request returns segmentation masks that represent the object of interest. |
{kind=link}
Loading
Sorry, something went wrong. Reload?
Sorry, we cannot display this file.
Sorry, this file is invalid so it cannot be displayed.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,59 @@ | ||
| import os | ||
|
|
||
| os.environ["API_KEY"] = "<YOUR-API-KEY>" | ||
| from inference.models.sam2 import SegmentAnything2 | ||
| from inference.core.utils.postprocess import masks2poly | ||
| import supervision as sv | ||
| from PIL import Image | ||
| import numpy as np | ||
|
|
||
| image_path = "./examples/sam2/hand.png" | ||
| m = SegmentAnything2(model_id="sam2/hiera_large") | ||
|
|
||
| # call embed_image before segment_image to precompute embeddings | ||
| embedding, img_shape, id_ = m.embed_image(image_path) | ||
|
|
||
| # segments image using cached embedding if it exists, else computes it on the fly | ||
| raw_masks, raw_low_res_masks = m.segment_image(image_path) | ||
|
|
||
| # convert binary masks to polygons | ||
| raw_masks = raw_masks >= m.predictor.mask_threshold | ||
| poly_masks = masks2poly(raw_masks) | ||
|
|
||
| point = [250, 800] | ||
| # give a negative point (point_label 0) or a positive example (point_label 1) | ||
| # uses cached masks from prior call | ||
| raw_masks2, raw_low_res_masks2 = m.segment_image( | ||
| image_path, | ||
| point_coords=[point], | ||
| point_labels=[0], | ||
| ) | ||
|
|
||
| raw_masks2 = raw_masks2 >= m.predictor.mask_threshold | ||
|
|
||
| image = np.array(Image.open(image_path).convert("RGB")) | ||
|
|
||
| mask_annotator = sv.MaskAnnotator() | ||
| dot_annotator = sv.DotAnnotator() | ||
|
|
||
| detections = sv.Detections( | ||
| xyxy=np.array([[0, 0, 100, 100]]), mask=np.array([raw_masks]) | ||
| ) | ||
| detections.class_id = [i for i in range(len(detections))] | ||
| annotated_image = mask_annotator.annotate(image.copy(), detections) | ||
| im = Image.fromarray(annotated_image) | ||
| im.save("sam.png") | ||
|
|
||
| detections = sv.Detections( | ||
| xyxy=np.array([[0, 0, 100, 100]]), mask=np.array([raw_masks2]) | ||
| ) | ||
| detections.class_id = [i for i in range(len(detections))] | ||
| annotated_image = mask_annotator.annotate(image.copy(), detections) | ||
|
|
||
| dot_detections = sv.Detections( | ||
| xyxy=np.array([[point[0] - 1, point[1] - 1, point[0] + 1, point[1] + 1]]), | ||
| class_id=np.array([1]), | ||
| ) | ||
| annotated_image = dot_annotator.annotate(annotated_image, dot_detections) | ||
| im = Image.fromarray(annotated_image) | ||
| im.save("sam_negative_prompted.png") |
Oops, something went wrong.